Theses
The following PhD, Master and Bachelor theses are/were authored at the competence center ACMIT and/or its scientific and company partners.
F. Adebayo (in progress), “AI Methods for Tissue Analytics“
S. Akhter (in progress), “Objective Assessment of Donning and Doffing Surgical Gloves“
S. Aljomaa (in progress), “Objective Assessment of Donning and Doffing Surgical Gloves“
C. Barr (in progress), “Ultrasound Guidance in Neurosurgery”
A. Borji (in progress), “Image-Derived AI-Based Methods to Support Treatment Decision-Making for Pediatric Osteosarcoma Patients”
L. Conolly (in progress), “Robotic Breast Conserving Surgery“
R. Hisey (in progress), “Surgical Workflow Analysis”
H. Marton (in progress), “In Vitro Investigation of Lesions Created during Radiofrequency Ablation of Atrial Fibrillation”
K. Móga (in progress), “VR/AR/MR Enhanced Non-Technical Support in Surgery”
E. J. Muniya (in progress), “AI Based Point-Cloud Non-Rigid Registration Methods for Soft Tissue”
T. D. Nagy (in progress), “Methodological Approach for Subtask Automation in Robot-Assisted Minimally Invasive Surgery”
N. Saidi (in progress), “Image Retrieval and Classification in Radiological Images Using Graph Neural Networks“
I. SM. Ragib Shahriar (in progress), “Optimized Trajectories for Interventional Imaging for Dentistry and Medicine Applications“
C. Yeung (in progress), ”Intraoperative Breast Cancer Segmentation in Ultrasound”
P. Nasute (2024), “Breast Cancer Surgery Outcome Analysis”
O. Aryeetey (2024), “Development of 3D Printable Tissue-Mimicking Meta-Materials for Functional Anatomical Models”
M. de Vries (2023), ”Steerable Needles in Prostate Brachytherapy: From Sketch to MDR-Compliant Batch”
L. Jaksa (2023), “Development of an Additive Manufacturing System for Producing Tissue-Mimicking Materials“
R. Levendovics (2023), “Endoscopic Image and Kinematic Data-Based Autonomous Technical and Non-Technical Skill Assessment in Robot-Assisted Minimally Invasive Surgery”
S. Estermann (2021), “Development of a Process for Reproducing Biological Tissues in Terms of Their Mechanical Properties by Means of 3D Printing”
S. Hatamikia (2021), “Patient Specific Source-Detector Trajectory Optimization for Cone Beam Computed Tomography“
F. Jelínek (2015), “Steering and Harvesting Technology for Minimally Invasive Biopsy”
D. Puchberger (2015), “Novel Sensor System for Integrated Wound Monitoring Methods”
T. Haidegger (2011), “Theory and Method to Enhance Computer-Integrated Surgical Systems”
N. Ansems (in progress), “Advancing Fetoscopic Repair of Complex Gastroschisis: Proof of Principle for a Novel Closure Method Using a Silicone Ring with Membrane“
T. van Deudekom (in progress), “Reducing Occupational Radiation Exposure in Cardiac Catheterisation Laboratories: Dose Rate Predictions and Feedback Strategies“
T. Elliott (in progress), “AI-Based Analysis of Mass Spectrometry Tissue Analytics“
K. Hara-Lee (in progress), “Robot-Assisted Breast Conserving Surgery“
R. Incze (in progress), “Point of Care Ultrasound Protocols in the Management of Covid“
R. Jadadic (in progress), “The Volumetric Measurement of Periapical Lesions in CBCT and its Relation with the Dental Apical Inflammation Score (DAIS)“
H. Jiang (in progress), “Needle Detection and Localization in Ultrasound Images based on Deep Learning“
H. Jungreuthmayer (in progress), “Source-Detector Trajectory Optimization for Customized CBCT FOV Extension Using Simulated Annealing Algorithm“
S. D.S. Kanhai (in progress), “Design of a Detailed Female Pelvis Model for Gynaecological Brachytherapy Applications“
D. Leeb (in progress), “Intra-operative needle tracking for HDR of Cervical Tumor“
B. Long (in progress), “AI Methods for Computer-Assisted Hernia Surgical Training“
E. Lukacs (in progress), “Kinematic Data-Based Skill Assessment in Robot-Assisted Minimally Invasive Surgery“
S. Nasser (in progress), “AI-Based Analysis of EKG Signal in Crucial Care Setting“
L. Pool (in progress), “Design of a Patient-Tailored 3D-Printed HDR Brachytherapy Applicator for the Treatment of Cervical Cancer“
O. Radcliff (in progress), “Intra-Operative High Frequency Ultrasound Imaging of Breast Cancer“
L. de Rouw (in progress), “Design Requirements for Future Technology to Enhance Surgical Instrument Counting: An Observational Study at the Reinier de Graaf Gasthuis"
R. Szabo (in progress), “Deep Learning Based Real-Time Decision Support System for Lung Ultrasound Evaluation“
M. N. Toth (in progress), “Autonomous Phase Detection in Robot-Assisted Minimally Invasive Surgery“
W. Wang (in progress), “Designing a Bone Fracture Apparatus for Surgical Training Applied on Human Cadaver“
O. Wind (in progress), “Developing and Validating an Interoperability Mockup for ISO/IEEE 11073-Compliant Devices in Smart Operating Rooms“
J. Zong (in progress), “Computational Performance Analysis of the NousNav Neurosurgery Navigation System“
D. P. Cernelev (2024), “Analysis of Electromagnetic Surgical Navigation“
B. Huegen (2024), “The Design and Development of an Anthropomorphic Coronary Artery Network Phantom: To Assist in the Development and Validation of Novel Imaging-Related Technologies“
A. J. Mommersteeg (2024), “Design of a Minimal Invasive Sentinel Lymph Node Biopsy Device: Actuating a Locally Expanding Adaptable Cutting Blade“
M. F. Wempe (2024), “MINT-Minimally Invasive Tensiometry: A Device to Quantify Tension During Laparoscopic Herniorrhaphy“
N. Kitner (2023), “Catheter Segmentation in Ultrasound for High Dose Rate Brachytherapy of the Prostate“
A. Morton (2023), “Robot-Assisted Breast Cancer Surgery“
A. Schonewille (2023), “Tracked 3D Ultrasound Navigated Abdominal Biopsy Procedure with Registered Tomographic Scans”
M. Sandrini (2023), “Model Predictive Variable Impedance Control for Redundant Manipulators“
D. Tognolo (2023), “Robotic Ultrasound System Based on Deep Reinforcement Learning“
M. Asselin (2022), “A Flexible Framework for Semi-Automatic Inverse Planning of Abdominal Organ Tumor Ablation“
C. Barr (2022), “Ultrasound Volume Reconstruction and Segmentation in Prostate Biopsy”
L. Connolly (2022), “Robotic Breast Conserving Surgery”
H. Jongeneel (2022), “Scheduling Cardiac Catheterization Laboratories with Monte Carlo Simulation“
S. Koschitz (2022), “Development of a Functional Anatomical Model for Simulation of the Human Heartbeat“
J. Keizer (2021), “Computer Vision in the Operation Room: Testing the Feasibility of a Computer Vision Algorithm for Instrument Detection in the Operation Room“
L. Koopman (2021), “The Influence of Rotation on the Precision of Needle End-Point Position in Lateral Direction for Biopsy“
R. Doczi (2021), “Realizing of a Complete Software Architecture for Eye Surgery Robots“
M. Exenberger (2021), “Digitaler Workflow für Vollständig Geführte Implantationen mit In-House Gefertigten Borschablonen (Pilotstudie)“
I. van Heijningen (2021), “Development of a Novel Non-Invasive Expandable Knee Prothesis“
R. Kolonics (2021), “Montage und Zentrierung Asphärischer Linsen“
E. van Koten (2021), “MINT: Minimally Invasive Tensiometry: A Novel Method to Assess Laparoscopic Herniorrhaphy“
D. van der Molen (2021), “The Design of a Brain and Tumor Phantom: Focused on Mimicking the Stiffness of the Brain and Glioblastoma Multiforme Tumor Tissue“
A. Santilli (2021), “Metabolomic Tissue Analysis“
R. Boedhoe (2020), “Range of Motion Assessment during Total Hip Arthroplasty”
H. Cherni (2020), “Cyber Security in Medical Robotics“
F. Fessel (2020), “Präzision von 3D-gedruckten Zahnmodellen unter Anwendung Unterschiedlicher Fertigungstechnologien“
G. Lajko (2020), “Endoscopic Image-Based Skill Assessment in Robot-Assisted Minimally Invasive Surgery”
M. M. Nobel (2020), “The Design of a Manually Operated Compliant Mechanism Steerable Needle for High Dose-Rate Brachytherapy of the Prostate”
E. Veldman (2020), “Design and Development of a Prostate Phantom Model to Mechanically Mimic Human Tissue”
N. Zhang (2020), “Three-Axis Force-Sensing Hip Implant for Soft Tissue Tension Assessment during Total Hip Arthroplasty”
E. Cakar (2019), “A Chaos-Based Signal Masking Application Using Liu System“
L. Jaksa (2019), “Evaluation of a Ceramic 3D Printing Technology Considering Medical Applications“
I. Nigicser (2019), “Rapidly Deployable Structures for Tissue Retraction“
B. Sagmeister (2019), “Test System for a Dynamic Ligament Balancing Sensorplate”
P. Suti (2019), “Hand Modeling and Image Segmentation with Real-time Algorithms”
K. Takacs (2019), “Fundamentals of Robotic Laparoscopic Surgery“
M. Bordeus (2018), “Berechnungsmodell der Bandsynapsen der Bipolarzellen in der Retina“
B. Kocsis (2018), “Volumetric Visualization of Vessel Structure Gained from Infra or Thermal Images Coupled with (3D) CT, MRI“
N. Loschko (2018), “Untersuchung über die Wirkung Verschiedener Intraokularlinsen auf den Seheindruck unter Verwendung des IOL Simulators“
V. Sári (2018), “Objective Methods to Compare Hand Hygiene Assessment Tools“
Cs. Urban (2018), “Virtual Ultrasound Trainer Development”
K. Knopp (2017), “Microsurgical Performance under Stress: A NeuroTouch Simulator Study”
Z. Pintér (2017), “Intellectual Property Protection for Novel Medtech Devices“
L. Oberleitener (2017), “Eine Pilotstudie zur Erforschung der Auswirkungen Verschiedener IOL Designs in Subjektiven 2D und 3D Szenarien“
S. Ambardekar (2016), “Multifunctional Instrument for Intracranial Neurosurgery”
Sz. Barcza (2016), “Automating Laparoscopic Camera Handling”
R. Elek (2016), “Image-Based Camera Control for Surgical Robotic Interventions”
S. Jordan (2016), “Surgical Robot Navigation and Control”
E. Kámán (2016), “Hand Model Fitting and Segmentation Validation”
S. Seetharaman (2016), “New Software Interface for Robot-Assisted Needle Placement in Neurosurgery”
S. Kumar (2015), “Implementation of an Integrated Document Management System at ACMIT and Croma Pharma”
D. Nagy (2015), “An Automatic Method for Camera Positioning During Laparoscopic Surgery”
R. Vörös (2015), “Robotic Technology in Head and Neck Surgery”
C. Nepel (2014), “Übersichtsarbeit zum Thema Posttraumatische und Antiinflammatorische Kryotherapie“
H. Pock (2014), “Entwicklung eines Regelkreises auf Basis des Pelletier Effektes für Partielle Körperkühlung”
S. Bansaghi (2013), “Risk Perception on Hand Hygiene”
V. Godri (2013), “Validating a Laparoscopic Trainer”
T. Mayer (2013), “Evaluation of the Axial Shift of an Intraocular Lens Using a Capsular Bag Mechanical Model”
N. Plank (2013), “Automatisierung eines Optischen Messaufbaus zur Charakterisierung von Intraokularlinsen”
G. Fenyvesi (2012), “Susceptibility of Intra-operative Electromagentic Tracking Systems”
A. Hahnekamp (2012), “Automatisierte Erkennung und Manipulation von Medizinischen Textilien”
M. Nagy (2012), “Automation of Hand Washing Control”
T. Neugebauer (2012), “Integration einer Längenmessvorrichtung in eine Chirurgische Bohrmaschine”
V. Reisenbauer (2012), “Hochdruck Wasserstrahl Bearbeitung – Technische und Kaufmännische Bewertung”
M. Fegerl (2011), “Modular Control System for Medical Robotics – Design and Implementation”
M. Krenn (2011), “Usability Conform Scenario Configurator for a Therapeutic Robot System”
A. Lehotsky (2011), “Developing a Hand Hygiene Control System”
P. Steiger (2011), “Dynamische Analyse eines Segmentierten Antriebsstranges für Gekrümmte Chirurgische Instrumente”
A. Graf (in progress), “Multi Data Integration for In-Vitro Personalized Reproductive Medicine“
P. Koppensteiner (in progress), “Beitrag zum Design eines Robotersystems zur gezielten Prostata-Biopsie“
B. Pohn (in progress), “AI and Imaging for In-Vitro Fertilization and Personalized Reproductive Medicine“
J. Zakall (in progress), “Role of Radiomics in Personalized Reproductive Medicine“
S. Füllenhals (2023), “Design und Bau einer Testumgebung für eine Roboter-Steuerung mit multi-modalem Feedback“
D. Leeb (2023), “Berührungsfreie Patientenregistration mit einem 3D Kamerasystem“
L. Plunger (2023), “Integrating Ontology, Surgical Process Modeling and Video Annotation for Workflow Analysis“
O. Wind (2023), “Augmented Reality für die Unterstützung von Navigierten Chirurgischen Prozessen“
C. Reisinger (2021), “Nadelpositionierung zur Gewebeprobenentnahme mit einem Kollaborativen Roboter“
B. Supper (2021), “Image-Based Automated Non-Technical Skill Assessment in Robotic Surgery”
G. Benko (2020), “Development of Modular Vision System for Endoscopic Surgical Interventions”
M. Markoczy (2019), “Reducing HAI with Technology”
L. Gorbay-Nagy (2019), “Large Scale Objective Hand Hygiene Assessment”
M. Racz (2019), “Image-Based Camera Control during Robotic Surgery”
M. Rendes (2019), “Point Cloud Based Surface Estimation for Radiosurgery Treatment”
G. Tóth (2019), “Image-Based Camera Control for Robotic Surgery”
R. Kolonics (2018), “Entwicklung eines 3D-Druckverfahrens für Künstliche Gewebe aus Silikon”
L. Jaksa (2017), “Force Feedback Unit Design for a Laparoscopic Surgical Simulator”
M. Katana (2014), “Development of a Handheld Tool for Optimized Needle Insertion for Cervix Cancer Treatment”
H. Pock (2014), “Entwicklung eines Regelkreises auf Basis des Peltier-Effektes für par Partielle Körperkühlung”
R. Nagl (2013), “Concentration-, Wavelength- and Temperature- dependent Determination of the Refractive Index of Saline Solutions”
E. Rank (2013), “Construction of a Mechanical Eye Model for Evaluation of Physiological and Physical Optical Quality Criteria of Intraocular Lenses”
P. Schattovich (2013), “Wireless Control of a Microrobot-prototype for Robotic Natural Orifice Transluminal Endoscopic Surgery”
S. Schulz (2012), “Entwicklung eines Mikrocontrolleralgorithmus zur Charakterisierung von Gasen und deren Konzentration”
Non-disclosure
Many projects are subject to strict non disclosure agreements. We ask for your understanding that only a limited number of projects can be shown in the projects section.
Launched Medical Devices with Relevant ACMIT Contribution
 ©Hinterramskogler/ACMIT Gmbh
©Hinterramskogler/ACMIT GmbhApplication-Oriented Models
ACMIT Gmbh
Description
- manufacturing of application-oriented anatomical models
- models to support medical device development and for training of clinicians
- reduction of cadaver tests
 ©Myeloma Registry
©Myeloma Registry Austrian Myeloma Registry (AMR)
Partner: Oncotyrol – Center for Personalized Cancer Medicine GmbH
ACMIT contribution: Software development.
Description
- individually developed web-based software with the highest data protection
- clinical management of myeloma patients
- evaluation of disease course, adverse reactions in individual patients populations
- tool for reviewing guidelines, clinical trials and pharmacoeconomic conditions
 ©Bloom Diagnostics AG, Bloom Diagnostics GmbH
©Bloom Diagnostics AG, Bloom Diagnostics GmbH Bloom System
Legal manufacturer: Bloom Diagnostics AG, Zurich
Bloom Diagnostics GmbH, Vienna
ACMIT contribution: Usability engineering
Description
- smart system combines laboratory technology with personalized analysis
- detection of blood markers in a few minutes
- recorded and evaluated health information in the Bloom App
- personalized health report containing individual analysis and actionable information
- new biomarkers are added continuously
- highest standards for data security
 ©blausen
©blausen CHES-Software and Patient Reported Outcome (PRO)
Partner: Evaluation Software Development GmbH
ACMIT contribution: Software development.
Description
- computer-based evaluation of oncological treatments and their impact on the quality of life
- PRO database via patient collected questionnaire
- therapy optimization with the estimation of psychooncological needs
 ©EMTensor, Inc.
©EMTensor, Inc. EMTensor BrainScanner
Legal manufacturer: EMTensor, Inc.
ACMIT contribution: Patient interface, usability engineering and test system.
Description
- first electromagnetic tomographic brain scanner
- rapid, safe, portable stroke detection that complements the diagnosis by MRI and CT
- continuous 24/7 brain scanning without ionizing radiation or contrast agents
- cost-saving bedside brain screening solution for emergency room, intensive care unit, and radiology department
- in ambulance brain imaging for triage of stroke patients
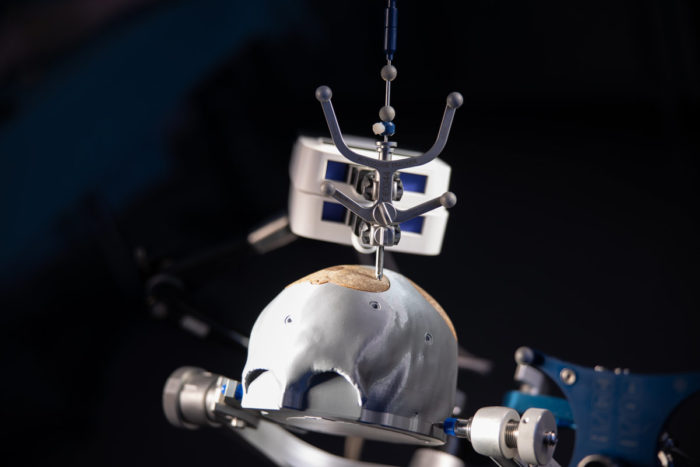
 ©iSYS Medizintechnik GmbH
©iSYS Medizintechnik GmbH iSYS1
Legal manufacturer: iSYS Medizintechnik GmbH
ACMIT contribution: Product development from idea to clinical use and contract manufacturing.
Description
- SMART Robotic positioning and guidance remote system for image-guided interventions
- for precise instrument positioning
- consistent precision and efficiency providing less chance of complications
 ©piur imaging GmbH
©piur imaging GmbH PIUR tUS Infinity
Legal manufacturer: piur imaging GmbH
ACMIT contribution: Product development from idea to clinical use and contract manufacturing.
Description
- PIUR tUS Infinity transfers any US machine into a high-resolution 3D scanner
- mobile, small, wireless tool for a rapid, acccurate, safe, reconstructive 3D imaging
- The Infinity Video Box connects to any standard US and transfers 2D images to the Infinity Workstation via Wi-Fi in real-time
- The Infinity Sensor clips onto any linear US transducer and sends the information to the Infinity Workstation via Bluetooth
- The Infinity Workstation collects information from the Infinity Video Box and Sensor and applies AI-based image algorithms to generate tomographic US volumes
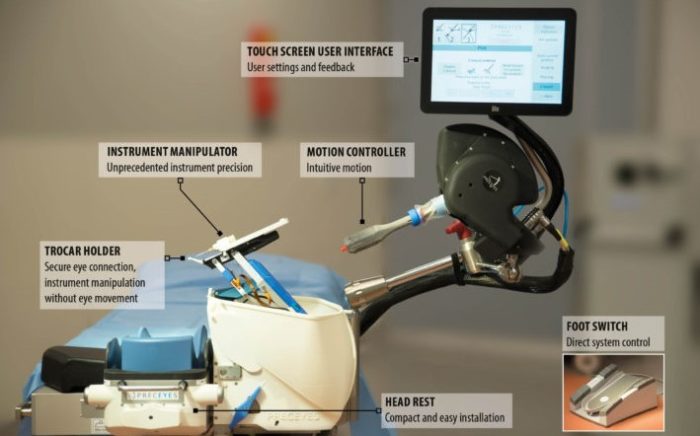 ©PRECEYES B.V.
©PRECEYES B.V. PRECEYES Surgical System R1.1
Legal manufacturer: Preceyes B.V.
ACMIT contribution: Usability engineering and testing.
Description
- clinically validated robotic assistance for vitreoretinal surgery
- >20 μm precision
- compatible with a wide range of instruments
- optimized workflow with high safety
 ©W&H Dentalwerk Bürmoos GmbH
©W&H Dentalwerk Bürmoos GmbH Primea Advanced Air
Legal manufacturer: W&H Dentalwerk Bürmoos GmbH
„ACMIT is a research and development partner of W&H for many years. In the course of the development of the Primea Advanced Air, ACMIT performed important basic development of the regulated turbine and the ring-shaped LED lighting. Furthermore, ACMIT provided first functional models, which we then further developed to a serial market-ready product.” says Dr. Wilhelm Brugger, Management R&D.
Description
- advanced option for dental restoration and prosthetics
- 100% shadow-free illumination with regulated turbine and ring-shaped LED lighting
- awarded with the Austrian National Award for Innovation in 2018
 ©DEZIMAL GmbH
©DEZIMAL GmbH RALV
Partner: DEZIMAL GmbH, 1stQ Deutschland GmbH
ACMIT contribution: Product development from application-oriented research to successful establishment of a spin-off company
Description
- experience of achievable vision for presbyopic patients
- preoperative experience of postoperative vision with intraocular lenses (IOL) before implantation
- comparison of different lens types and subjective evaluation prior to surgery
- selection of the best lens model for each patient individually before implantation
- maximized patient satisfaction
- reduced risk of follow-up surgery
 ©Rayner Intraocular Lenses Ltd.
©Rayner Intraocular Lenses Ltd. RayOne Trifocal (Toric) and Sulcoflex Trifocal
Legal manufacturer: Rayner Intraocular Lenses Ltd.
ACMIT contribution: Multifocal lens design.
Description
- trifocal intraocular lenses (IOL implants)
- proprietary diffractive profile for far, intermediate and near vision
- combined with a preloaded injector
- designed for less pupil dependency
- comfortable transitioning from near to distance activities
- light loss of only 11%
- reduced surgical risk associated with IOL exchange
 ©Hand-in-Scan Zrt.
©Hand-in-Scan Zrt. Semmelweis Hand Hygiene System
Legal manufacturer: Hand-in-Scan Zrt.
ACMIT contribution: Product development from idea to clinical use and prototyping.
Description
- hand hygiene education in healthcare, food industry and biotechnology
- validated hand hygiene control for hand rubbing
- objective and quantitative evaluation of hand hygiene
- reduction of healthcare-associated infections
 ©Lohmann & Rauscher GmbH
©Lohmann & Rauscher GmbH Suprasorb CNP P3
Legal manufacturer: Lohmann & Rauscher GmbH
ACMIT contribution: Product development, usability engineering and test system.
Description
- negative pressure wound therapy
- potential tool for treatment of acute, chronic, postoperatively wounds, decubitus or ulcus cruris venosum
- compact structure with a drain connected unit
 ©ACMIT Gmbh
©ACMIT GmbhVirtobot-System
Legal manufacturer: ACMIT Gmbh
The Virtobot-System has been developed based on the Virtopsy® process of the Institute of Forensic Medicine, at the University of Zurich.
Description
- virtual or traditional autopsy conducted with surface scanning and 3D Imaging
- multi-tool microscopy, spectroscopy, percutaneous biopsy combined with CT/MRI
- postmortem angiography, identification or ventilation
- integrated kinect camera