Abschlussarbeiten
Die folgenden Doktor-, Master- und Bachelorthesen werden/wurden am Kompetenzzentrum ACMIT und/oder deren wissenschaftlichen und betrieblichen Partnern verfasst.
F. Adebayo (in progress), “AI Methods for Tissue Analytics“
S. Akhter (in progress), “Objective Assessment of Donning and Doffing Surgical Gloves“
S. Aljomaa (in progress), “Objective Assessment of Donning and Doffing Surgical Gloves“
C. Barr (in progress), “Ultrasound Guidance in Neurosurgery“
A. Borji (in progress), “Image-Derived AI-Based Methods to Support Treatment Decision-Making for Pediatric Osteosarcoma Patients”
L. Conolly (in progress), “Robotic Breast Conserving Surgery“
R. Hisey (in progress), “Surgical Workflow Analysis”
H. Marton (in progress), “In Vitro Investigation of Lesions Created during Radiofrequency Ablation of Atrial Fibrillation”
K. Móga (in progress), “VR/AR/MR Enhanced Non-Technical Support in Surgery”
E. J. Muniya (in progress), “AI Based Point-Cloud Non-Rigid Registration Methods for Soft Tissue”
T. D. Nagy (in progress), “Methodological Approach for Subtask Automation in Robot-Assisted Minimally Invasive Surgery”
N. Saidi (in progress), “Image Retrieval and Classification in Radiological Images Using Graph Neural Networks“
I. SM. Ragib Shahriar (in progress), “Optimized Trajectories for Interventional Imaging for Dentistry and Medicine Applications“
C. Yeung (in progress), ”Intraoperative Breast Cancer Segmentation in Ultrasound”
P. Nasute (2024), “Breast Cancer Surgery Outcome Analysis”
O. Aryeetey (2024), “Development of 3D Printable Tissue-Mimicking Meta-Materials for Functional Anatomical Models”
M. de Vries (2023), ”Steerable Needles in Prostate Brachytherapy: From Sketch to MDR-Compliant Batch”
L. Jaksa (2023), “Development of an Additive Manufacturing System for Producing Tissue-Mimicking Materials“
R. Levendovics (2023), “Endoscopic Image and Kinematic Data-Based Autonomous Technical and Non-Technical Skill Assessment in Robot-Assisted Minimally Invasive Surgery”
S. Estermann (2021), “Development of a Process for Reproducing Biological Tissues in Terms of Their Mechanical Properties by Means of 3D Printing”
S. Hatamikia (2021), “Patient Specific Source-Detector Trajectory Optimization for Cone Beam Computed Tomography“
F. Jelínek (2015), “Steering and Harvesting Technology for Minimally Invasive Biopsy”
D. Puchberger (2015), “Novel Sensor System for Integrated Wound Monitoring Methods”
T. Haidegger (2011), “Theory and Method to Enhance Computer-Integrated Surgical Systems”
N. Ansems (in progress), “Advancing Fetoscopic Repair of Complex Gastroschisis: Proof of Principle for a Novel Closure Method Using a Silicone Ring with Membrane“
T. van Deudekom (in progress), “Reducing Occupational Radiation Exposure in Cardiac Catheterisation Laboratories: Dose Rate Predictions and Feedback Strategies“
T. Elliott (in progress), “AI-Based Analysis of Mass Spectrometry Tissue Analytics“
K. Hara-Lee (in progress), “Robot-Assisted Breast Conserving Surgery“
R. Incze (in progress), “Point of Care Ultrasound Protocols in the Management of Covid“
R. Jadadic (in progress), “The Volumetric Measurement of Periapical Lesions in CBCT and its Relation with the Dental Apical Inflammation Score (DAIS)“
H. Jiang (in progress), “Needle Detection and Localization in Ultrasound Images based on Deep Learning“
H. Jungreuthmayer (in progress), “Source-Detector Trajectory Optimization for Customized CBCT FOV Extension Using Simulated Annealing Algorithm“
S. D.S. Kanhai (in progress), “Design of a Detailed Female Pelvis Model for Gynaecological Brachytherapy Applications“
D. Leeb (in progress), “Intra-operative needle tracking for HDR of Cervical Tumor“
B. Long (in progress), “AI Methods for Computer-Assisted Hernia Surgical Training“
E. Lukacs (in progress), “Kinematic Data-Based Skill Assessment in Robot-Assisted Minimally Invasive Surgery“
S. Nasser (in progress), “AI-Based Analysis of EKG Signal in Crucial Care Setting“
L. Pool (in progress), “Design of a Patient-Tailored 3D-Printed HDR Brachytherapy Applicator for the Treatment of Cervical Cancer“
O. Radcliff (in progress), “Intra-Operative High Frequency Ultrasound Imaging of Breast Cancer“
L. de Rouw (in progress), “Design Requirements for Future Technology to Enhance Surgical Instrument Counting: An Observational Study at the Reinier de Graaf Gasthuis"
R. Szabo (in progress), “Deep Learning Based Real-Time Decision Support System for Lung Ultrasound Evaluation“
M. N. Toth (in progress), “Autonomous Phase Detection in Robot-Assisted Minimally Invasive Surgery“
W. Wang (in progress), “Designing a Bone Fracture Apparatus for Surgical Training Applied on Human Cadaver“
O. Wind (in progress), “Developing and Validating an Interoperability Mockup for ISO/IEEE 11073-Compliant Devices in Smart Operating Rooms“
J. Zong (in progress), “Computational Performance Analysis of the NousNav Neurosurgery Navigation System“
D. P. Cernelev (2024), “Analysis of Electromagnetic Surgical Navigation“
B. Huegen (2024), “The Design and Development of an Anthropomorphic Coronary Artery Network Phantom: To Assist in the Development and Validation of Novel Imaging-Related Technologies“
A. J. Mommersteeg (2024), “Design of a Minimal Invasive Sentinel Lymph Node Biopsy Device: Actuating a Locally Expanding Adaptable Cutting Blade“
M. F. Wempe (2024), “MINT-Minimally Invasive Tensiometry: A Device to Quantify Tension During Laparoscopic Herniorrhaphy“
N. Kitner (2023), “Catheter Segmentation in Ultrasound for High Dose Rate Brachytherapy of the Prostate“
A. Morton (2023), “Robot-Assisted Breast Cancer Surgery“
A. Schonewille (2023), “Tracked 3D Ultrasound Navigated Abdominal Biopsy Procedure with Registered Tomographic Scans”
M. Sandrini (2023), “Model Predictive Variable Impedance Control for Redundant Manipulators“
D. Tognolo (2023), “Robotic Ultrasound System Based on Deep Reinforcement Learning“
M. Asselin (2022), “A Flexible Framework for Semi-Automatic Inverse Planning of Abdominal Organ Tumor Ablation“
C. Barr (2022), “Ultrasound Volume Reconstruction and Segmentation in Prostate Biopsy”
L. Connolly (2022), “Robotic Breast Conserving Surgery”
H. Jongeneel (2022), “Scheduling Cardiac Catheterization Laboratories with Monte Carlo Simulation“
S. Koschitz (2022), “Development of a Functional Anatomical Model for Simulation of the Human Heartbeat“
J. Keizer (2021), “Computer Vision in the Operation Room: Testing the Feasibility of a Computer Vision Algorithm for Instrument Detection in the Operation Room“
L. Koopman (2021), “The Influence of Rotation on the Precision of Needle End-Point Position in Lateral Direction for Biopsy“
R. Doczi (2021), “Realizing of a Complete Software Architecture for Eye Surgery Robots“
M. Exenberger (2021), “Digitaler Workflow für Vollständig Geführte Implantationen mit In-House Gefertigten Borschablonen (Pilotstudie)“
I. van Heijningen (2021), “Development of a Novel Non-Invasive Expandable Knee Prothesis“
R. Kolonics (2021), “Montage und Zentrierung Asphärischer Linsen“
E. van Koten (2021), “MINT: Minimally Invasive Tensiometry: A Novel Method to Assess Laparoscopic Herniorrhaphy“
D. van der Molen (2021), “The Design of a Brain and Tumor Phantom: Focused on Mimicking the Stiffness of the Brain and Glioblastoma Multiforme Tumor Tissue“
A. Santilli (2021), “Metabolomic Tissue Analysis“
R. Boedhoe (2020), “Range of Motion Assessment during Total Hip Arthroplasty”
H. Cherni (2020), “Cyber Security in Medical Robotics“
F. Fessel (2020), “Präzision von 3D-gedruckten Zahnmodellen unter Anwendung Unterschiedlicher Fertigungstechnologien“
G. Lajko (2020), “Endoscopic Image-Based Skill Assessment in Robot-Assisted Minimally Invasive Surgery”
M. M. Nobel (2020), “The Design of a Manually Operated Compliant Mechanism Steerable Needle for High Dose-Rate Brachytherapy of the Prostate”
E. Veldman (2020), “Design and Development of a Prostate Phantom Model to Mechanically Mimic Human Tissue”
N. Zhang (2020), “Three-Axis Force-Sensing Hip Implant for Soft Tissue Tension Assessment during Total Hip Arthroplasty”
E. Cakar (2019), “A Chaos-Based Signal Masking Application Using Liu System“
L. Jaksa (2019), “Evaluation of a Ceramic 3D Printing Technology Considering Medical Applications“
I. Nigicser (2019), “Rapidly Deployable Structures for Tissue Retraction“
B. Sagmeister (2019), “Test System for a Dynamic Ligament Balancing Sensorplate”
P. Suti (2019), “Hand Modeling and Image Segmentation with Real-time Algorithms”
K. Takacs (2019), “Fundamentals of Robotic Laparoscopic Surgery“
M. Bordeus (2018), “Berechnungsmodell der Bandsynapsen der Bipolarzellen in der Retina“
B. Kocsis (2018), “Volumetric Visualization of Vessel Structure Gained from Infra or Thermal Images Coupled with (3D) CT, MRI“
N. Loschko (2018), “Untersuchung über die Wirkung Verschiedener Intraokularlinsen auf den Seheindruck unter Verwendung des IOL Simulators“
V. Sári (2018), “Objective Methods to Compare Hand Hygiene Assessment Tools“
Cs. Urban (2018), “Virtual Ultrasound Trainer Development”
K. Knopp (2017), “Microsurgical Performance under Stress: A NeuroTouch Simulator Study”
Z. Pintér (2017), “Intellectual Property Protection for Novel Medtech Devices“
L. Oberleitener (2017), “Eine Pilotstudie zur Erforschung der Auswirkungen Verschiedener IOL Designs in Subjektiven 2D und 3D Szenarien“
S. Ambardekar (2016), “Multifunctional Instrument for Intracranial Neurosurgery”
Sz. Barcza (2016), “Automating Laparoscopic Camera Handling”
R. Elek (2016), “Image-Based Camera Control for Surgical Robotic Interventions”
S. Jordan (2016), “Surgical Robot Navigation and Control”
E. Kámán (2016), “Hand Model Fitting and Segmentation Validation”
S. Seetharaman (2016), “New Software Interface for Robot-Assisted Needle Placement in Neurosurgery”
S. Kumar (2015), “Implementation of an Integrated Document Management System at ACMIT and Croma Pharma”
D. Nagy (2015), “An Automatic Method for Camera Positioning During Laparoscopic Surgery”
R. Vörös (2015), “Robotic Technology in Head and Neck Surgery”
C. Nepel (2014), “Übersichtsarbeit zum Thema Posttraumatische und Antiinflammatorische Kryotherapie“
H. Pock (2014), “Entwicklung eines Regelkreises auf Basis des Pelletier Effektes für Partielle Körperkühlung”
S. Bansaghi (2013), “Risk Perception on Hand Hygiene”
V. Godri (2013), “Validating a Laparoscopic Trainer”
T. Mayer (2013), “Evaluation of the Axial Shift of an Intraocular Lens Using a Capsular Bag Mechanical Model”
N. Plank (2013), “Automatisierung eines Optischen Messaufbaus zur Charakterisierung von Intraokularlinsen”
G. Fenyvesi (2012), “Susceptibility of Intra-operative Electromagentic Tracking Systems”
A. Hahnekamp (2012), “Automatisierte Erkennung und Manipulation von Medizinischen Textilien”
M. Nagy (2012), “Automation of Hand Washing Control”
T. Neugebauer (2012), “Integration einer Längenmessvorrichtung in eine Chirurgische Bohrmaschine”
V. Reisenbauer (2012), “Hochdruck Wasserstrahl Bearbeitung – Technische und Kaufmännische Bewertung”
M. Fegerl (2011), “Modular Control System for Medical Robotics – Design and Implementation”
M. Krenn (2011), “Usability Conform Scenario Configurator for a Therapeutic Robot System”
A. Lehotsky (2011), “Developing a Hand Hygiene Control System”
P. Steiger (2011), “Dynamische Analyse eines Segmentierten Antriebsstranges für Gekrümmte Chirurgische Instrumente”
A. Graf (in progress), “Multi Data Integration for In-Vitro Personalized Reproductive Medicine“
P. Koppensteiner (in progress), “Beitrag zum Design eines Robotersystems zur gezielten Prostata-Biopsie“
B. Pohn (in progress), “AI and Imaging for In-Vitro Fertilization and Personalized Reproductive Medicine“
J. Zakall (in progress), “Role of Radiomics in Personalized Reproductive Medicine“
S. Füllenhals (2023), “Design und Bau einer Testumgebung für eine Roboter-Steuerung mit multi-modalem Feedback“
D. Leeb (2023), “Berührungsfreie Patientenregistration mit einem 3D Kamerasystem“
L. Plunger (2023), “Integrating Ontology, Surgical Process Modeling and Video Annotation for Workflow Analysis“
O. Wind (2023), “Augmented Reality für die Unterstützung von Navigierten Chirurgischen Prozessen“
C. Reisinger (2021), “Nadelpositionierung zur Gewebeprobenentnahme mit einem Kollaborativen Roboter“
B. Supper (2021), “Image-Based Automated Non-Technical Skill Assessment in Robotic Surgery”
G. Benko (2020), “Development of Modular Vision System for Endoscopic Surgical Interventions”
M. Markoczy (2019), “Reducing HAI with Technology”
L. Gorbay-Nagy (2019), “Large Scale Objective Hand Hygiene Assessment”
M. Racz (2019), “Image-Based Camera Control during Robotic Surgery”
M. Rendes (2019), “Point Cloud Based Surface Estimation for Radiosurgery Treatment”
G. Tóth (2019), “Image-Based Camera Control for Robotic Surgery”
R. Kolonics (2018), “Entwicklung eines 3D-Druckverfahrens für Künstliche Gewebe aus Silikon”
L. Jaksa (2017), “Force Feedback Unit Design for a Laparoscopic Surgical Simulator”
M. Katana (2014), “Development of a Handheld Tool for Optimized Needle Insertion for Cervix Cancer Treatment”
H. Pock (2014), “Entwicklung eines Regelkreises auf Basis des Peltier-Effektes für par Partielle Körperkühlung”
R. Nagl (2013), “Concentration-, Wavelength- and Temperature- dependent Determination of the Refractive Index of Saline Solutions”
E. Rank (2013), “Construction of a Mechanical Eye Model for Evaluation of Physiological and Physical Optical Quality Criteria of Intraocular Lenses”
P. Schattovich (2013), “Wireless Control of a Microrobot-prototype for Robotic Natural Orifice Transluminal Endoscopic Surgery”
S. Schulz (2012), “Entwicklung eines Mikrocontrolleralgorithmus zur Charakterisierung von Gasen und deren Konzentration”
Vertraulichkeitsvereinbarung
Viele Projekte unterliegen strengen Geheimhaltungsvereinbarungen. Wir bitten um Ihr Verständnis, dass nur eine begrenzte Anzahl von Projekten im Projektbereich gezeigt werden kann.
Einführung von Medizinprodukten mit relevantem ACMIT-Beitrag
 ©Hinterramskogler/ACMIT Gmbh
©Hinterramskogler/ACMIT GmbhAnwendungsorientierte Modelle
ACMIT Gmbh
Description
- Herstellung von anwendungsorientierten anatomischen Modellen
- Modelle zur Unterstützung der Entwicklung von Medizinprodukten und für das Training von klinischem Personal
- Reduktion von Kadavertests
 ©Bloom Diagnostics AG, Bloom Diagnostics GmbH
©Bloom Diagnostics AG, Bloom Diagnostics GmbH Bloom System
Inverkehrbringer: Bloom Diagnostics AG, Zürich
Bloom Diagnostics GmbH, Wien
ACMITs Beitrag: Usability Engineering
Description
- smartes System kombiniert Labortechnologie mit personalisierter Analyse
- Nachweis von Blutmarkern in wenigen Minuten
- Aufzeichnung und Auswertung von Gesundheitsinformationen in der Bloom App
- personalisierter Gesundheitsbericht mit individueller Analyse und Empfehlungen
- neue Biomarker werden kontinuierlich hinzugefügt
- höchste Standards für Datensicherheit
 ©blausen
©blausen CHES-Software und Patient Reported Outcome (PRO)
Partner: Evaluation Software Development GmbH
ACMITs Beitrag: Softwareentwicklung.
Description
- computergestützte Bewertung onkologischer Behandlungen und deren Auswirkungen auf die Lebensqualität
- PRO-Datenbank auf Basis von Patientenfragebögen
- Therapieoptimierung durch Abschätzung psychoonkologischer Bedürfnisse
 ©EMTensor, Inc.
©EMTensor, Inc. EMTensor BrainScanner
Inverkehrbringer: EMTensor, Inc.
ACMITs Beitrag: Patientenschnittstelle, Usability Engineering und Testsystem.
Description
- erster elektromagnetischer tomographischer Gehirnscanner
- schnelle, sichere und mobile Schlaganfallerkennung, die die Diagnose von MRT und CT ergänzt
- kontinuierliches Gehirnscanning rund um die Uhr ohne ionisierende Strahlung oder Kontrastmittel
- kostensparende Lösung für das Gehirnscreening am Krankenbett für Notaufnahme, Intensivstation und Radiologieabteilung
- Bildgebung des Gehirns zur Triage von Schlaganfallpatienten im Krankenwagen
 ©iSYS Medizintechnik GmbH
©iSYS Medizintechnik GmbH iSYS1
Inverkehrbringer: iSYS Medizintechnik GmbH
ACMITs Beitrag: Produktentwicklung von der Idee zur klinischen Anwendung und Auftragsfertigung.
Description
- SMART Roboterpositionierungs- und Navigationssystem für bildgeführte Eingriffe
- für präzise Instrumentenpositionierung
- konstante Präzision und Effizienz zur Reduktion von Komplikationen
 ©Myelom-Register
©Myelom-Register Österreichisches Myelom-Register (AMR)
Partner: Oncotyrol – Center for Personalized Cancer Medicine GmbH
ACMITs Beitrag: Softwareentwicklung.
Description
- individuell entwickelte webbasierte Software mit höchstem Datenschutz
- klinisches Management von Myelom-Patienten
- Bewertung des Krankheitsverlaufs, Nebenwirkungen bei einzelnen Patientenpopulationen
- Instrument zur Überprüfung von Leitlinien, klinischen Studien und pharmakoökonomischen Bedingungen
 ©piur imaging GmbH
©piur imaging GmbH PIUR tUS Infinity
Inverkehrbringer: piur imaging GmbH
ACMITs Beitrag: Produktentwicklung von der Idee zur klinischen Anwendung und Auftragsfertigung.
Description
- PIUR tUS Infinity verwandelt jedes 2D-Ultraschallgerät in einen hochauflösenden 3D-Scanner
- mobiles, kleines, drahtloses Tool für eine schnelle, präzise, sichere, rekonstruktive 3D-Bildgebung
- die Infinity Video Box verbindet sich mit allen Standard 2D Ultraschallgeräten und überträgt 2D-Bilder über WLAN in Echtzeit an die Infinity Workstation
- der Infinity Sensor passt auf jeden linearen 2D Ultraschallkopf und sendet die Informationen über Bluetooth an die Infinity Workstation
- die Infinity Workstation sammelt Informationen von Infinity Video Box und Sensor und kreiert mit KI-basierten Bildalgorithmen tomografische Volumenbilder
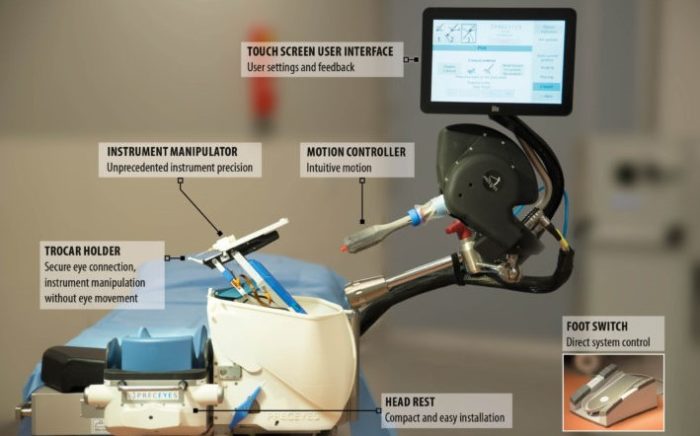 ©PRECEYES B.V.
©PRECEYES B.V. PRECEYES Surgical System R1.1
Inverkehrbringer: Preceyes B.V.
ACMITs Beitrag: Usability Engineering und Bewertung.
Description
- klinisch validierte robotische Assistenz für die vitreoretinale Chirurgie
- >20 μm Genauigkeit
- kompatibel mit vielen Instrumenten
- optimierter Arbeitsablauf mit hoher Sicherheit
 ©W&H Dentalwerk Bürmoos GmbH
©W&H Dentalwerk Bürmoos GmbH Primea Advanced Air
Inverkehrbringer: W&H Dentalwerk Bürmoos GmbH
„ACMIT ist langjähriger Forschungs- und Entwicklungspartner von W&H. Im Zuge der Entwicklung der Primea Advanced Air hat ACMIT wichtige Grundentwicklungen der geregelten Turbine und der ringförmigen LED-Beleuchtung durchgeführt. Außerdem, lieferte ACMIT die ersten Funktionsmodelle, die wir dann zu einem serienreifen Produkt weiterentwickelt haben.“ sagt Dr. Wilhelm Brugger, Management F&E.
Description
- Verbesserung für Zahnrestauration und Prothetik
- 100% schattenfreie Beleuchtung mit geregelter Turbine und ringförmiger LED-Beleuchtung
- 2018 ausgezeichnet mit dem Österreichischen Staatspreis für Innovation
 ©DEZIMAL GmbH
©DEZIMAL GmbH RALV
Partner: DEZIMAL GmbH, 1stQ Deutschland GmbH
ACMITs Beitrag: Produktentwicklung von der anwendungsorientierten Forschung bis zur erfolgreichen Spinn-off-Firmengründung.
Description
- Erfahrungen mit erreichbarem Sehvermögen für alterssichtige Patienten
- präoperative Erfahrungen mit postoperativem Sehvermögen mit Intraokularlinsen (IOL) vor der Implantation
- Vergleich verschiedener Linsentypen und subjektive Bewertung vor der Operation
- Auswahl des besten Linsenmodells für jeden Patienten individuell vor der Implantation
- maximierte Patientenzufriedenheit reduziertes Risiko einer Folgeoperation
 ©Rayner Intraocular Lenses Ltd.
©Rayner Intraocular Lenses Ltd. RayOne Trifocal (Toric) und Sulcoflex Trifocal
Inverkehrbringer: Rayner Intraocular Lenses Ltd.
ACMITs Beitrag: Multifokales Linsendesign.
Description
- trifokale Intraokularlinsen (IOL-Implantate)
- proprietäres diffraktives Profil für Fern-, Zwischen- und Nahsicht
- kombiniert mit einem Injektor
- optimiert für weniger Einfluss der Pupille
- komfortabler Übergang von Nah- zur Fernsicht
- Lichtverlust max. 11%
- reduziertes chirurgisches Risiko im Zusammenhang mit dem IOL-Austausch
 ©Hand-in-Scan Zrt.
©Hand-in-Scan Zrt. Semmelweis Handhygienesystem
Inverkehrbringer: Hand-in-Scan Zrt.
ACMITs Beitrag: Produktentwicklung von der Idee zur klinischen Anwendung und Prototypenfertigung.
Description
- Handhygienetraining in Gesundheitswesen, Lebensmittelindustrie und Biotechnologie
- validierte Handhygienekontrolle
- objektive und quantitative Bewertung der Handhygiene
- Reduktion von Infektionen mit Krankenhauskeimen
 ©Lohmann & Rauscher GmbH
©Lohmann & Rauscher GmbH Suprasorb CNP P3
Inverkehrbringer: Lohmann & Rauscher GmbH
ACMITs Beitrag: Produktentwicklung, Usability Engineering und Testsystem.
Description
- Unterdruck Wundtherapie
- Gerät zur Behandlung von akuten, chronischen, postoperativen Wunden, Dekubitus oder Ulcus cruris venosum
- kompakter Aufbau mit einer Ablaufanschlusseinheit
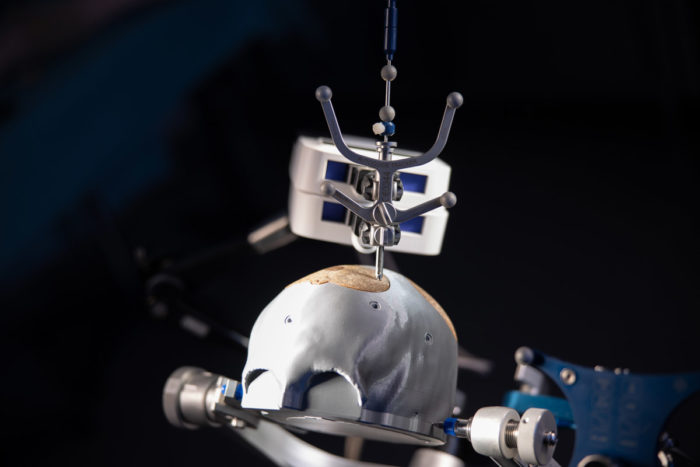
 ©ACMIT Gmbh
©ACMIT GmbhVirtobot-System
Inverkehrbringer: ACMIT Gmbh
Das Virtobot-System wurde auf Basis des Virtopsy®-Prozesses des Instituts für Rechtsmedizin der Universität Zürich entwickelt.
Description
- virtuelle oder traditionelle Autopsie mit Oberflächenscan und 3D-Bildgebung
- Multi-Tool-Mikroskopie, Spektroskopie, perkutane Biopsie kombiniert mit CT/MRT
- postmortale Angiographie, Identifizierung oder Ventilation
- integrierte Kinect-Kamera