Digital Health getriebene Therapiesysteme
ACMIT legt unter verstärkter Berücksichtigung chirurgischer Daten den Schwerpunkt auf die Entwicklung neuer Technologien für minimal- und mikroinvasive Verfahren – das Ziel sind „Digital Health getriebene Therapiesysteme“.
Aus technischer und „prozeduraler“ Sicht deckt die Forschung und Entwicklung von ACMIT die gesamte Kette von Aktivitäten von der fortschrittlichen Planung der Therapie bis hin zur Durchführung der Therapie mit intelligenten Werkzeugen (z. B. mit in-situ Monitoring der Therapie, erweiterte Kontrolle des Therapieprozesses) und Führung dieser Werkzeuge (z. B. mittels medizinischer Robotersysteme oder Navigationstechnologie) bis hin zu Aspekten bezüglich Anwenderseite (z. B. Workflow-Unterstützung) und sogar darüber hinaus (z. B. Einrichtung einer chirurgischen Wissensbasis für eine globalere Weiterentwicklung chirurgischer Verfahren). Um die Kette der translationalen Forschung und Entwicklung zu vervollständigen, umfasst die Arbeit von ACMIT auch die Bewertung dieser neuen Technologien in realistischer klinischer Umgebung, die auch den erhöhten Anforderungen der EU-Medizinprodukteverordnung (MDR) berücksichtigt. Die Forschungs- und Entwicklungsaktivitäten von ACMIT sind in drei Forschungsbereiche gegliedert. Der Forschungsumfang wurde in eine "Sense – Plan – Act"-Struktur gegliedert.
Ihr Ansprechpartner

Gernot Kronreif
Prof. h.c. Dipl.-Ing. Dr.techn.
Chief Scientific Officer
+43 2622 22859 0gernot.kronreif@acmit.at
Autonomie in der Chirurgie
Dieser Forschungsbereich befasst sich mit Werkzeugen und Methoden zur Durchführung von Behandlungen, d. h. die Umsetzung geplanter Maßnahmen in Maßnahmen - einschließlich Methoden zur Anpassung geplanter Maßnahmen auf der Grundlage der tatsächlichen Situation. Im Kontrollschema eines Therapieprozesses deckt dieser Bereich die „handelnde“ Phase ab.
Das Forschungsthema „Intelligente Werkzeuge und Instrumente“ befasst sich mit einigen der wichtigsten Punkte zur Verbesserung modernster Minimalinvasive Chirurgie (MIC)- Verfahren. Basierend auf dem bestehenden Konzept für steuerbare Stiletts und Trokare werden Werkzeuge für konkrete Anwendungen entwickelt und klinisch getestet. Die Aktivitäten im Bereich Werkzeugdesign beziehen sich auch auf die Integration der im Forschungsbereich „Sensorsysteme für Diagnose und Therapie“ entwickelten Sensoren in chirurgische Werkzeuge zur Echtzeit in-vivo Therapieüberwachung. Vervollständigt wird das Spektrum der Aktivitäten in Bezug auf „intelligente Werkzeuge“ durch die Untersuchung neuer chirurgischer Zugangssysteme. Darüber hinaus werden neue Anwendungsmöglichkeiten für unsere bestehende Robotertechnologie sowie Konzepte für kognitive chirurgische Systeme untersucht. Dabei werden insbesondere Aspekte der autonomen Aufgabenausführung sowie kollaborative Mensch / Roboter-Setups im Hinblick auf konkrete klinische Anwendungsfälle analysiert.
Das Forschungsthema „Informationsbasierte Therapie“ zielt darauf ab, Konzepte für eine datenbasierte Behandlung zu untersuchen. Es werden neue Methoden für die chirurgische Navigation entwickelt, darunter eine effiziente und genaue Registrierung, Weichteilnavigation und Navigation auf der Basis von Echtzeit Bildgebung. Darüber hinaus befassen wir uns mit der Behandlungsoptimierung auf Basis von Sensordaten im lokalen Kontext sowie global durch die Berücksichtigung von Methoden aus den Bereichen "Surgical IoT" und "Surgical Data Science".


Ihr Ansprechpartner
Gernot Kronreif
Prof. h.c. Dipl.-Ing. Dr.techn.
Autonomy in Surgery, Sensor Systems
+43 2622 22859 0gernot.kronreif@acmit.at
Chirurgische Daten für eine Optimierte Therapie
„Surgical Data Science“ (SDS) ist ein neues Feld und ein wesentlicher Beitrag zum aktuellen Trend der „Digitalisierten Medizin“ bzw. „Chirurgie 4.0“. SDS umfasst die strukturierte Erfassung relevanter Daten über die gesamte diagnostische und therapeutische Handlungskette und die Nutzung der daraus resultierenden Datenbanken zur Optimierung von Therapieverfahren.
Das COMET-Modul „Surgical Data for Optimized Therapy“ (SD-OpT) von ACMIT stellt eine wichtige Erweiterung der Forschungsbereiche von ACMIT dar - sensorintegrierte Tools, medizinisches IoT oder patientenspezifische Planungstools sind eine ideale Grundlage für SDS.
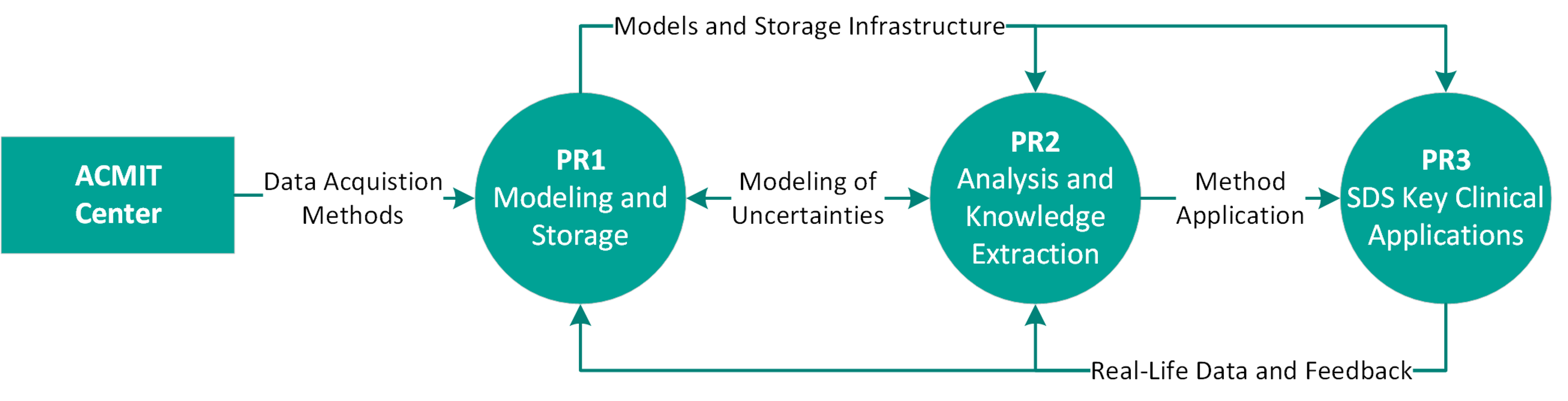
SD-OpT untersucht Methoden der manuellen und automatischen Wissensextraktion aus Datenströmen und der Analyse anwendungsspezifischer Daten, um relevante Zusammenhänge zur Optimierung von Diagnose und Behandlung zu identifizieren. SD-OpT demonstriert das immense Potenzial von SDS durch die Realisierung repräsentativer und aussagekräftiger klinischer Pilot-Anwendungen. Die Ergebnisse von SD-OpT werden von ACMIT in „Digital Health Driven Therapy Systems“ integriert.
Die F&E-Aktivitäten sind in drei Projekte gegliedert:
- PR1: Modellierung, Speicherung und Verteilung von Informationen
- PR2: Datenanalyse und Wissensextraktion
- PR3: Evaluierung von SDS in wichtigen klinischen Anwendungen
SD-OpT bildet eine große Koalition führender Institute in den Kernbereichen von SDS - eine enge Zusammenarbeit von internationalen hochrangigen Partnern aus Wissenschaft und Industrie.
Wissenschaftliche Partner:
- Technische Universität Delft, Institut für Biomechanische Technik (Delft, NL)
- Deutsches Krebsforschungszentrum DKFZ (Heidelberg, DE)
- Innovationszentrum für Computerassistierte Chirurgie (ICCAS) Universität Leipzig (Leipzig, DE)
- INSERM/MediCIS, Universität Rennes (Rennes, FR)
- Tokyo Women’s Medical University, ABMES (Tokyo, JP)
- Universität Innsbruck, Institut für Informatik (Innsbruck, AT)
Key Researcher:
- Dr. Pierre Jannin, MediCIS/INSERM - Universität Rennes
- Dr. Thomas Neumuth, ICCAS - Universität Leipzig
- Dr. Keno März, DKFZ Heidelberg
Unternehmenspartner:
- EBG MedAustron GmbH (Wiener Neustadt, AT)
- Erbe Elektromedizin GmbH (Tübingen, DE)
- Evaluation Software Development GmbH (Innsbruck, AT)
- Richard Wolf GmbH (Knittlingen, DE)
- BHS Technologies GmbH (Innsbruck, AT)


Ihr Ansprechpartner

Tamás Haidegger
Prof. Dipl.-Ing. Dr.techn.
Therapy Planning and Workflow Support, Surgical Data Science
+43 2622 22859 0tamas.haidegger@acmit.at
Sensorsysteme für Diagnose und Therapie
Dieser Forschungsbereich beschäftigt sich hauptsächlich mit der Entwicklung neuartiger Sensortechnologie für die Therapieüberwachung und deckt die "Sensing"-Phase im Kontrollschema eines Therapieprozesses ab.
Hauptthemen sind „Hochentwickelte Sensorsysteme“ und „Verbesserung der Sehqualität“.
“Hochentwickelte Sensorsysteme“ zielen darauf ab, intraoperativ Feedback an den Chirurgen zu geben. Das geschieht durch system-/instrumentenintegrierte Sensorkomponenten. Dieses Echtzeit-Feedback über das behandelte Gewebe kann die Intervention signifikant verbessern oder direkt diagnostische Ergebnisse liefern. Geplant ist unter anderem die Entwicklung miniaturisierter Sensorkomponenten zur Integration in Instrumente für die minimalinvasive Chirurgie (z.B. nadelbasierte Werkzeuge mit Sensorik). Zusammen mit der Sensordatenerfassung und Signalanalyse bilden diese Themen die Forschungsschwerpunkte. Ein weiterer Teil der Aktivitäten betrifft sensorbasierte Systeme und Werkzeuge, die nicht direkt an chirurgischen Eingriffen beteiligt sind. Diese Aufgaben sind für Point-of-Care-Anwendungen, die in den Bereichen Prävention und häusliche Pflegeüberwachung angesiedelt sind. Ziel ist patientenindividuelle Daten für Diagnose und therapiebezogene Entscheidungen zur Verfügung zu stellen.
Basierend auf unserem Know-how im Bereich Optikdesign in Kombination mit Simulationswerkzeugen befasst sich das Thema „Verbesserung der Sehqualität“ mit der Entwicklung optischer Elemente unter dem Begriff „Qualität des Sehens“. Der Schwerpunkt der Aktivitäten liegt in der Augenheilkunde, insbesondere Optikdesign-Konzepte für Intraokularlinsen (IOLs) in Kombination mit Methoden/Werkzeugen zur Bewertung der subjektiven Sehqualität und der Patientenzufriedenheit. Multifokale und erweiterte Tiefenschärfe-IOLs ermöglichen einerseits die Erfüllung individueller Patientenwünsche in der Kataraktchirurgie, erfordern andererseits aber auch eine verbesserte Patientenunterstützung bzw. -führung, die im klinischen Workflow durch geeignete Werkzeuge unterstützt werden muss. Daher gehören das Linsendesign für Kapselsack-IOLs sowie ergänzende Linsenplattformen zu den Hauptforschungsaufgaben. Neben diesen Aktivitäten in der Augenheilkunde arbeiten wir an optischen Setups und Komponenten, die nicht direkt einer sensorischen Funktionalität gewidmet sind, wie z.B. der Verbesserung der begrenzten Sicht des Chirurgen bei endoskopischen Anwendungen.


Ihr Ansprechpartner
Gernot Kronreif
Prof. h.c. Dipl.-Ing. Dr.techn.
Autonomy in Surgery, Sensor Systems
+43 2622 22859 0gernot.kronreif@acmit.at
Therapieplanung und Workflow-Unterstützung
Dieser Forschungsbereich beschäftigt sich mit neuen Methoden zur chirurgischen Behandlungsplanung in der präoperativen Phase sowie mit der Workflow-Unterstützung um dem Chirurgen zu helfen, nicht vom Plan abzuweichen. Im Kontrollschema eines Therapieprozesses deckt dieser Bereich die "Planungsphase" ab.
Das Thema „Therapie-Workflow-Unterstützung“ befasst sich mit verschiedenen Aspekten der Workflow-Unterstützung, wie die Aktualisierung unseres aktuellen Workflow-Bewertungssystems, die Entwicklung einer generischen Workflow-Modellierungs-Toolbox und die Implementierung einer Workflow-Engine. Eine Hauptaufgabe ist die Erzeugung prozessspezifischer Prozessmodelle und deren Anwendung für Workflow-Monitoring- und Workflow-Support-Systeme. Die oben genannten Module werden in Demonstratoren in verschiedenen Konfigurationen und für verschiedene klinische Anwendungsfälle integriert.
Das Thema „Erweiterte Planungskonzepte“ beschäftigt sich grundsätzlich mit zwei unterschiedlichen Ansätzen für die präoperative Planung. Die Untersuchung von Software-Werkzeugen für die Planung fokussiert sich insbesondere auf die Integration von Simulationsmethoden in den Planungsprozess zur sofortigen Abschätzung des Behandlungseffekts und zur iterativen Planungsverbesserung. Darüber hinaus werden Einsatzmöglichkeiten bereits vorhandener Daten/Kenntnisse für eine optimale Planung untersucht. Das Potenzial von additiver Fertigung (3D Druck) in der präoperativen Planung wird detailliert analysiert – einschließlich des Einsatzes in ausgewählten Anwendungsfällen.


Ihr Ansprechpartner
Tamás Haidegger
Prof. Dipl.-Ing. Dr.techn.
Therapy Planning and Workflow Support, Surgical Data Science
+43 2622 22859 0tamas.haidegger@acmit.at
digibrAIn
Ein hybrider, auf Finite-Elemente-Methode (FE) und Künstlicher Intelligenz (KI) basierender Ansatz zur präzisen Vorhersage von Brain Shift in der bildgeführten Neurochirurgie (GFF-Projektnummer: FTI24-G-024)
Bei Hirntumoroperationen unterstützen bildgeführte neurochirurgische Systeme bzw. Neuronavigationssysteme Neurochirurginnen und Neurochirurgen dabei, Tumoren zu lokalisieren, indem präoperative Bilddaten mit dem Koordinatensystem der Patientin bzw. des Patienten abgeglichen werden. Gehirnverformungen, auch als Brain Shift bezeichnet, können jedoch zu Abweichungen zwischen der geschätzten und der tatsächlichen Tumorposition führen und damit das Risiko einer Schädigung von Hirngewebe erhöhen. Bestehende Methoden zur Kompensation von Brain Shift erfordern häufig zusätzliche intraoperative Bildgebung wie MRT oder Ultraschall oder werden durch manuelle Landmarkenregistrierung initiiert; beides kann den chirurgischen Arbeitsablauf stören. Im Projekt digibrAIn schlagen wir einen neuartigen rechnergestützten Ansatz vor, der intraoperative Bilddaten des Stereomikroskops nach Eröffnung des Schädels (Kraniotomie) und der Dura mater nutzt, um eine automatische, KI-basierte nicht-rigide Registrierung ohne Beeinträchtigung des etablierten klinischen Workflows durchzuführen. Unser Framework verwendet fortgeschrittene Deep-Learning-Verfahren zur nicht-rigiden Registrierung von 3D-Punktwolken, kombiniert mit synthetischen Trainingsdaten, die mithilfe der Finite-Elemente-Methode (FEM) erzeugt werden, um mögliche Verformungen von Hirnstrukturen realitätsnah abzubilden. Darüber hinaus nutzt es Transfer Learning, um die zeitaufwendigen initialen FEM-Simulationen und das Training des KI-Modells auf Basis des diagnostischen MRT bereits Wochen vor der Operation durchführen zu können und das Modell anschließend anhand der aktuellsten Informationen aus einem Planungs-MRT am Tag vor der Operation schnell und effizient zu aktualisieren. Im Rahmen des Projekts wird der vorgeschlagene Ansatz mithilfe eines neuartigen instrumentierten Gehirnphantoms verifiziert, indem gemessene und vorhergesagte Brain Shifts verglichen werden. Dieses Framework hat das Potenzial, Brain Shift in Echtzeit präzise vorherzusagen, die Planung optimaler chirurgischer Zugangswege zu unterstützen und Chirurginnen und Chirurgen durch aktualisierte Informationen zur Tumorlage und zu kritischen Hirnstrukturen zu führen, ohne den Workflow zu unterbrechen. Letztlich zielt unser Ansatz darauf ab, die chirurgische Qualität zu erhöhen, die Patientensicherheit zu verbessern und sich positiv auf die Lebensqualität der Patientinnen und Patienten auszuwirken.
Kooperationspartner:
- ACMIT Gmbh
- DPU – Danube Private University, Forschungsgruppe Hatamikia
- TUW – Technische Universität Wien, Institut für Leichtbau und Struktur-Biomechanik (ILSB)
- Drittmittel-/Drittparteibeitrag: MUG – Medizinische Universität Graz, Universitätsklinik für Neurochirurgie
Fördergeber:

Gesellschaft für Forschungsförderung Niederösterreich m.b.H. (GFF NÖ)
ACMIT Beitrag:
- Projektkoordination
- Gesamtkonzeption
- Erhebung klinischer Anforderungen über den klinischen Partner an der MUG
- Erfassung und Analyse medizinischer Bilddaten
- Herstellung eines Gehirnphantoms für Tests und Verifizierung
- Durchführung der Verifizierungsstudie
FOSMON
Testung und Evaluierung einer faseroptischen Sensortechnologie zur in-situ und in-operando Überwachung der Wanddicke von Wärmetauscherrohren (GFF-Projektnummer: FTI21-A-005)
FOSMON misst die Wanddicke von wärmetauschenden Edelstahlrohren in rauen Hochdruck- und Hochtemperaturdampfumgebungen in-situ und in-operando mittels FFT-Analyse des Schwingungsspektrums. Das System nutzt faseroptische Interferometrie, wobei eine eng um das Rohr gewickelte Singlemode-Faserspule als intrinsischer Spannungs- und Schwingungssensor dient.
Projectstart: November 2022
Projectende: November 2025
Laufzeit: 36 Monate
Fördersumme: 282.945 €
Projektgesamtkosten: 435.300 €
Kooperationspartner:
![]()
![]()
Fördergeber:
Gesellschaft für Forschungsförderung Niederösterreich m.b.H. (GFF NÖ)
Beschreibung:
- Forschungs- und Entwicklungsmethode für zerstörungsfreie Prüfungen (NDT), der strukturellen Gesundheitsüberwachung (SHM) und Wandverdünnungsmessung von Wärmetauscherrohren (HE) in einem Stripper.
- Dieses Projekt schlägt ein neues Sensorsystem auf Basis der Hochkohärenz-Interferometrie vor, dass in einer „All-in-Fibre“-Sensorkonfiguration unter Verwendung von Singlemode-Glasfasern implementiert ist, zur in-situ- und in-operando-Überwachung der Wanddicke von HE-Rohren (siehe Abbildung unten).
- Haupthypothese: Ein permanenter Verlust an Materialmasse führt zu einer Wandverdünnung der HE-Rohre, was zu einer Veränderung der Resonanzfrequenz des Rohres führt und diese zu Höheren. Werten verschiebt.
 Fig. 1: Der Hochdruck-Stripper vorn bei Schoeller-Bleckmann Nitec, bereit für den Transport zum Kunden in Ägypten. Das Bild zeigt die Draufsicht auf den Rohrboden mit den im Stripper installierten Wärmetauscherrohren.
Fig. 1: Der Hochdruck-Stripper vorn bei Schoeller-Bleckmann Nitec, bereit für den Transport zum Kunden in Ägypten. Das Bild zeigt die Draufsicht auf den Rohrboden mit den im Stripper installierten Wärmetauscherrohren.
- Die Kernidee der vorgeschlagenen Technik besteht darin, die Resonanzfrequenz der Rohre aus dem FFT-Leistungsspektrum von Interferenzsignalen zu messen, die von faseroptischen Sensoren erhalten werden.
- Das System ist langfristig in verschiedenen Industriebereichen einsetzbar, die in rauen Umgebungen wie korrosiven Atmosphären und Hochdruck/Hochtemperaturbedingungen (HPHT) arbeiten.
- Es trägt zur Erhöhung der Sicherheit von Chemieanlagen bei, indem es strukturelle Ausfälle verhindert, die durch eine Ausdünnung der Rohrwände aufgrund von Korrosions- oder Erosionsvorgängen verursacht werden.
- Ziel ist das aktuelle Paradigma von der „zeitbasierten Wartung“ zur „zustandsbasierten Wartung“ zu ändern.
- Die erwarteten Kosteneinsparungen bieten den Endbenutzern eines solchen wanddünnen Überwachungssystems in ähnlichen Märkten erhebliche potenzielle Vorteile.
Referenzen:
- Z. Djinović, A. Gavrilović-Wohlmuther, M. Tomić, A fiber-optic technique for the wall thickness measurement of the industrial tubes under harsh environment, 47th MIPRO ICT and Electronics Convention (MIPRO), Opatija, Cratia, 20-24 May 2024, DOI: 10.1109/MIPRO60963.2024.1056927
- M.Tomić, A. Gavrilović-Wohlmuther, Z.Djinović, Measurement of Wall Thickness in Heat Exchanger Tubes by Simultaneous Use of Low- and Highcoherence Fiber-Optic Interferometry, 48th MIPRO ICT and Electronics Convention (MIPRO), 02-06 June 2025, DOI: 10.1109/MIPRO65660.2025.11131780
- EP000004310434B1 HEAT EXCHANGER WITH FIBRE OPTIC SENSOR FOR DETERMINING A THICKNESS OF A HEAT EXCHANGER TUBE OF THE HEAT EXCHANGER AND METHOD FOR OPERATING SUCH A HEAT EXCHANGER
- WO002024017511A1 HEAT EXCHANGER COMPRISING A FIBRE-OPTIC SENSOR FOR DETERMINING A TUBE WALL THICKNESS OF A HEAT-TRANSFER TUBE OF THE HEAT EXCHANGER AND METHOD FOR OPERATING SUCH A HEAT EXCHANGER
- ASHMOSD-I, Austrian Structural Health Monitoring System Demonstrator; FFG-BMVIT, Takeoff Program, Project No: 814579
- ASHMOSD-II, Austrian Structural Health Monitoring System Demonstrator; FFG-BMVIT, Takeoff Program, Project No: 830397, Follow up
Weitere Informationen finden Sie in der: FOSMON Brochure
Der Inhalt repräsentiert nicht notwendigerweise die Sichtweise des Landes Niederösterreich oder der Gesellschaft für Forschungsförderung Niederösterreich als Förderstelle. Weder das Land Niederösterreich noch die Förderstelle können daher für den Inhalt verantwortlich gemacht werden.
Für weitere Informationen:
Cornelia Häusler MSc.
Email: cornelia.haeusler@acmit.at
Für geschäftliche Interessen:
Dr. Aleksandra Gavrilovic-Wohlmuther
Email: a.gavrilovic-wohlmuther@christof-group.com
Mob: +43 664 80 883 4145



DEBRIDEMENT 2.0
Ein halbautomatisiertes robotisches System stellt traditionelle Annahmen in Frage
Eine angemessene Wunddebridement spielt eine entscheidende Rolle im Wundmanagement und bei der Heilung. In dieser Studie haben wir ein neuartiges, kliniknahes In-vitro -Testsystem entwickelt und evaluiert, das eine detaillierte Analyse mechanischer Wunddebridement-Verfahren ermöglicht. Das anwendungsorientierte In-vitro -Testsystem umfasst ein Gerät zur Prozessverfolgung des Debridements sowie ein robotisches Debridement-Simulationsgerät zusammen mit künstlichen Wunden . Die Debridement-Bewegungen, die Anzahl der Bewegungszyklen, Geschwindigkeiten sowie Kontaktkräfte von medizinischen Experten wurden in Echtzeit durch das Tracking-Gerät erfasst und mit dem robotischen System reproduziert. Unser In-vitro -Testsystem wurde durch mechanische Produktprüfungen im Debridement evaluiert. Die Wirksamkeit des Wunddebridements und die Produktaufnahme wurden analysiert. Die Reproduzierbarkeit und statistische Signifikanz der erhaltenen In-vitro -Ergebnisse bestätigten die Funktionalität und Eignung unseres Systems. Die mit unserem System gewonnenen Daten können zur Optimierung von Wunddebridement-Strategien durch Verbesserung bestehender Produkte und Verfahren oder zur Entwicklung neuer Ansätze verwendet werden. Insgesamt stellt unsere Innovation Analysesysteme für Debridement in Frage, die die Echtzeit-Individualität von Debridement-Verfahren ausschließen. Das halbautomatisierte robotische System ermöglicht einen effektiven Lernprozess – von der Echtzeitverfolgung über die In-vitro -Testung bis hin zur Rückführung in die Echtzeitanwendung . Dieser neue Ansatz schafft eine starke Verbindung zwischen In-vitro -Analyse und klinischer Anwendung.
Projektteam: C. Häusler, F. Fussenegger, A. Hahnekamp, C. Kment, J. Schnur, A. Unger, H. Weißenböck
Transformation zur 3D-digitalen Pathologie (3DPATH)
Partner:
- Clepio Biotech S.r.l., Italien
- Universität Bern, Schweiz
ACMITs Beitrag:
- Industrialisierung der Technologie und Einhaltung der IVD-Regularien
- Regulatory, Usability, Risk Management
- Herstellung von Kleinserien produktäquivalenter 3DPATH-Komponenten in vollständiger Übereinstimmung mit ISO 13485
- Validierung und Demonstration des 3DPATH-Systems
- Simulation für das Design optischer Systeme
- Montage optischer Systeme sowie Messsysteme zur Qualitätssicherung während und nach der Montage
Beschreibung:
-
3D-Histopathologie-Scanner zur klinischen Gewebebewertung, der Zuverlässigkeit, Durchsatz und Skalierbarkeit verbessert
-
Innovative Lichtblatt-Fluoreszenzmikroskopie (LSFM) und schnelle Datenanalysetechnologie mit Autofokus sowie Multispektralbildgebung mit hohem Innovationsgrad und Leistungsfähigkeit
-
Wirtschaftliche und gesellschaftliche Auswirkungen verbesserter Pathologie auf krebsbezogene Diagnoseentscheidungen
-
Präzise Diagnosen ermöglichen eine verbesserte Qualität der Patientenversorgung

Künstliche Intelligenz und Robotik für die Prostatabiopsie (ROBIOPSY)
Partner:
- University of Verona, Italien
- Needleye Robotics S.r.l., Italien
- Universitätsklinikum Freiburg, Deutschland
- Day One – Funding & Venture Building for Technology Transfer projects, Italien
ACMITs Beitrag:
- Benutzerzentriertes Design
- Regulatory Affairs Management
- Systemspezifikationen, Architektur, Integration und Verifizierung
- Usability-Bewertung
- Entwicklung von Roboterhardware und Steuerungssystem
- Entwicklung von Planungs- und Überwachungssoftware
- Risikomanagement
- Implementierung eines QMS
Beschreibung:
- Entwicklung eines Robotergeräts für die Prostatakrebsbiopsie als diagnostisches Werkzeug, das für klinische Studien bereit ist
- Eine multizentrische klinische Studie zur automatischen Prostatasegmentierung und Läsionsidentifizierung
- Analyse des Geschäftsszenarios der Prostatabiopsie in ausgewählten europäischen Ländern zur Zeit-/Kostenreduzierung
- Einfaches Design für einen kürzeren Eingriff und eine kürzere Schulung des medizinischen Personals
- Mehr Präzision, Sicherheit, Wiederholgenauigkeit dank KI
- Reduzierung von Zielerkennungs- und Positionierungsfehlern
- Frühzeitige Diagnose von Prostatakrebs, um die Lebensqualität der Patienten zu verbessern und die Sterblichkeitsrate zu senken

Anleitung künstlicher Intelligenz für die Roboter-Augenchirurgie (GEYEDANCE)
Partner:
- University of Verona, Altair Robotics Laboratory, Italien
- PRECEYES BV, Holland
- University of Ferrara, Italien
- University of Bern, ARTORG Center for Biomedical Engineering Research, Schweiz
- ZEISS Corporate Research and Technology (CRT), Deutschland
- ZEISS Medical Technology (MED), Deutschland
ACMITs Beitrag:
- Koordination des Projekts
- Durchführung von translationaler F&E für neue Therapieoptionen, einschließlich Regulatory Affairs Management
- Das Robotersystem von PRECEYES wird verwendet und angepasst, um eine einzigartige, von ACMIT entwickelte intraokulare Distanzerfassungsmodalität
- Entwicklung und Evaluation künstlicher Intelligenz (KI) - Leitsystems bei der Beurteilung der klinischen und Usability-Anforderungen
Beschreibung:
- GEYEDANCE künstliche Intelligenz-basiertes System unterstützt Netzhautchirurgen bei der Optimierung der OP, um die geistige und körperliche Belastung des Chirurgen zu reduzieren
- Bessere Operationsergebnisse für die Patienten
- Ausarbeitung konkreter und „fast zertifizierungsreifer“ Technologie, die im Rahmen einer ersten klinischen Studie evaluiert wird.
- CE-zertifizierte Roboterplattform “PRECEYES Surgical System”
- Ein Prototyp für ein optisches Common-Path-Kohärenztomographie(OCT)-System mit erweiterter Messtiefe entwickelt von ACMIT
- Entwicklung von KI-Komponenten
- Ein Gremium aus weltweit führenden Augenchirurgen, geleitet von der Universität Ferrara, bietet Anwendereinblicke und evaluiert die Ergebnisse

Nachahmung von Anpassung und Plastizität bei WÜRMERN (MAPWORMS)
Partner:
- Sant’Anna School of Advanced Studies, The BioRobotics Institute, Italien
- National Inter-University Consortium for Marine Sciences, Italien
- Hellenic Centre for Marine Research, Institute of Marine Biology, Biotechnology and Aquaculture, Griechenland
- Hebrew University of Jerusalem, Chemistry Department, Israel
- Vexlum Ltd., Finnland
ACMITs Beitrag:
- Translationale F&E für neue Therapieoptionen
- Entwicklung von Sensorsystemen für chirurgische Eingriffe
- Entwicklung eines Multimaterial-3D-Druckers
Beschreibung:
- Entwicklung des ersten bioinspirierten formverändernden Roboters basierend auf stimuli-responsiven Materialien
- Inspiriert von der marinen Annelida
- Vollständig autonomer Roboter für verschiedene Aufgaben durch Anpassung an die Umgebung
- Intelligente Hydrogele mit Formgedächtnis, die Morphing-Roboter darstellen und sich mit nicht-reaktiven Elementen verbinden
- US-Scanner mit hochauflösenden Transducer für die Realtime-Bildgebung der Aktuator-/Roboterelemente
- Instrumentarium von medizinischen 3D-Tracking-Systemen für Realtime-Tracking von Aktuator-/Roboterelementen
- Verschiedene 3D-Drucker für schnelles Prototyping
- Experimenteller OP zur Validierung/Demonstration ausgewählter biomedizinischer Anwendungsfälle
- Testaufbau für optische und faseroptische Elemente

Task Force zu Verpflichtungen für Medizinprodukte (MDOT)
Partner:
- Fraunhofer Gesellschaft zur Förderung der Angewandten Forschung E.V., Deutschland
- DEMCON advanced mechatronics Zuid B.V., Holland
- Borm Nanoconsult Holding BV, Holland
- FUNDACION CIDETEC, Spanien
- Manegold Christoph-Robert, Deutschland
- Medizinische Hochschule Hannover, Deutschland
- University of Southampton, UK
- Universität Linz, Österreich
- Uniwersytet Medyczny im Karola Marcinkowskiego W Poznaniu, Polen
- University of Leeds, UK
- Mathys AG Bettlach, Schweiz
- University of Luxembourg, Luxemburg
ACMITs Beitrag:
- Minimalinvasive Chirurgie
- Datenbankentwicklung
- Beratungsleistung
- Qualitäts- und Risikomanagement
- Prototyping für klinische Tests
Beschreibung:
- Einrichtung einer Datenplattform für eine vereinfachte und kostengünstige Konformitäts- und Sicherheitsbewertung, die auf die regulatorischen Anforderungen kleiner und mittelständischer Unternehmen (KMU) im MedTech-Bereich angesichts der Medizinprodukteverordnung (MDR)
- Prüfstände für Medizinprodukte angesichts der MDR verbessern und weiterentwickeln
- Reduzieren der MDR-Belastung für KMU, die sich die erforderlichen Tests nicht leisten können
- Automatisierung und Prognose
- Das Ziel von MDOT ist der Aufbau einer nachhaltigen Plattform, die es MedTech-KMU ermöglicht:
- eine Datenbank mit detaillierten Testdaten häufig verwendeter Komponenten aufzubauen
- Testdaten sicher und transparent auszutauschen, indem modernste Technologie verwendet wird, um die Kosten zu senken und gleichzeitig die Qualität und Sicherheit von Medizinproduktinnovationen zu erhöhen
- präklinische Evaluierungen häufig verwendeter Teile durchzuführen
- Zugang zu fortschrittlichen Test- und Herstellungsmethoden zu erhalten

Mathematische Modellierung komplexer Naturphänomene (DYNAMICS)
Partner:
- Politehnica Universität Timisoara, Rumänien
- Autonome Universität Barcelona, Spanien
- Obuda-Universität, Ungarn
- EPAM Systems, Ungarn
- Westliche Universität Timisoara, Rumänien
- Universität Craiova, Rumänien
- University of North Caroline at Charlotte, USA
- University of Sao Paulo at Sao Carlos, Brasilien
- Shanghai Jiao Tong Universität, China
ACMITs Beitrag:
- Fachwissen im Zusammenhang mit möglichen Anwendungen der Projektforschung in der Medizintechnik
- Vernetzungsmöglichkeiten für Projektforscher
- Beschäftigungsmöglichkeiten für Projektteilnehmer z.B. im Rahmen von Sommerschulen
Beschreibung:
- Beiträge zur Bifurkation der Kodimension k in der Theorie dynamischer Systeme
- Entwicklung neuer Erkenntnisse im Bereich Codim-k-Bifurkationen für kontinuierliche und diskrete dynamische Systeme
- Ausbildungsmöglichkeiten in diesen Bereichen für Nachwuchswissenschaftler
- Untersuchung von Codim-k-Bifurkationen mit ≥ 3, die aus degenerierten Bautin-Bifurkationen in kontinuierlichen „smooth“ dynamischen Systemen resultieren
- Untersuchund von Codim-k-Bifurkationen mit ≥ 3, die aus kontinuierlichen Hopf-Hopf (HH)-Bifurkationen resultieren „smooth“ dynamische Systeme
- Untersuchung von Codim-k-Bifurkationen in „smooth“ dynamischen Systemen, die aus anderen Bifurkationen entstehen
- Untersuchung von Codim-k-Bifurkationen ≥ 1 in „non-smooth“ dynamischen Systemen
- Untersuchung diskontinuierlicher stückweiser Differentialsysteme und kontinuierlicher und diskreter „non-smooth“ dynamischer Systeme, die aus der Modellierung von Oszillatoren mit Stößen resultieren

Interaktive Roboterendoskop-Anleitung in der Neurochirurgie (ENDOROB)
Partner:
- Universität Twente, Niederlande
- Charité – Universitätsmedizin Berlin, Klinik für Pädiatrische Neurochirurgie, Deutschland
- Medizinische Universität Wien, Abteilung für Neurochirurgie, Österreich
ACMITs Beitrag:
- Projektkoordinator
- Registrierter Dienstleister für Digital Innovation Hubs in Healthcare Robotics (DIH Hero) bei DIH Services
- Entwicklung eines Demonstrators zur Endoskop Anleitung
- Unterstützung bei der Produktzertifizierung für EU- und Nicht-EU-Märkte – Analyse der geltenden Standards, integriertes Risiko- und Usability-Management und ISO 13485-konforme Dokumentation
- Anbieter für eigenen Cloud-Datenserver
- Übertragung der Ergebnisse der Anwendungen im Bereich der Neurochirurgie, wie zum Beispiel der HNO-Chirurgie, der Wirbelsäulenchirurgie oder auch der Viszeralchirurgie
Beschreibung:
- Interaktive Roboterführung eines neurochirurgischen Endoskops
- Demonstrator für einen neuartigen Aufbau, basierend auf einer vorhandenen kleinen und leichten Roboterplattform
- Validierte endgültige Einrichtung in einem realen klinischen Szenario
- Vorteilhaft für die Workflow-Integration und Zugänglichkeit zum Operationsfeld
- Anwendungen bei endoskopisch unterstützten neurochirurgischen Eingriffen: endoskopischer transsphenoidaler Zugang für endosellare oder paraselläre Hypophysenoperationen und die dritte Ventrikulostomie

Distanzmessung für die robotergestützte Chirurgie (DIMRAS)
Partner:
- PRECEYES BV, Holland
ACMITs Beitrag:
- Unterstützung der Entwicklung und Zertifizierung von Robotersystemen für nadelbasierte Verfahren
- Entwicklung und OEM-Produktion (Original Equipment Manufacturer) eines Roboters für CT/CBCT-gesteuerte Verfahren in der interventionellen Radiologie
- Entwicklungspartner für ein neuartiges Robotersystem in der Neurochirurgie, das im November 2019 die FDA-Zulassung erhielt und vom Weltmarktführer für Neuronavigationssysteme vermarktet wurde
- Übertragen Sie DIMRAS-Ergebnisse auf RAS-Anwendungen außerhalb der Augenheilkunde, wie z. B. Hirntumorchirurgie
Beschreibung:
- ERM (Epiretinale Membran) kann durch Peeling der epiretinalen Membran und Vitrektomie behandelt werden
- Das in DIMRAS entwickelte Instrument ermöglicht es dem Roboter, verbotene Bereiche zu definieren, Netzhautkontakt während der Vitrektomie zu verhindern und eine Obergrenze für Netzhauteinkerbungen während des Membranpeelings festzulegen
- Übertragung der OCT-Technologie (optische Kohärenztomographie) aus dem Bereich der Diagnostik auf einen spezifischen klinischen Sensor
- Instrumentenintegrierter Abstandssensor zur robotergestützten Werkzeugmanipulation in der vitreoretinalen Chirurgie
- Sensorbasierte Robotermethode zur Verbesserung der Geschwindigkeit und Präzision der (halb-)automatisierten Navigation des Instruments während einer Augenoperation
- Erhöhte Reproduzierbarkeit und Sicherheit beim Membranpeeling und der Vitrektomie

Smarter autonomer robotergestützter Assistenzchirurg (SARAS)
Partner:
- University of Verona (UNIVR), Italien
- University of Moderna and Reggio Emilia (UNIMORE), Italien
- University of Ferrara (UNIFE), Italien
- Ospedale San Raffaele (OSR), Italien
- Universitat Politecnica de Catalunya (UPC), Spanien
- University of Dundee (UNIVDUN), UK
- Oxford Brookes University (OBU), UK
- Medineering GmbH (MEDIN), Deutschland
ACMITs Beitrag:
- Systemintegration und Phantomdesign
- Entwicklung multifunktionaler Werkzeuge, Medizinrobotik, Trainingssysteme für die medizinisch chirurgische Aus- und Weiterbildung sowie Workflow-Analyse
- Technische Spezifikation und Optimierung
- Usability Engineering und Unterstützung von Unternehmenspartnern bei der Produktzertifizierung
- Unterstützung von Verbreitungsmaßnahmen mit dem Netzwerk von klinischen Partnern und Krankenhausbetreibern
- Erschließung neuer Märkte (chirurgische Robotik, Phantomdesign und Training) zur kommerziellen Nutzung der Projektergebnisse
- Anwendung zertifizierter Entwicklungsprozesse (ISO 13485)
Beschreibung:
- Entwicklung der nächsten Generation von Roboter-Chirurgie Systemen für einen Chirurgen zur Durchführung von minimalinvasiven Roboteroperationen (R-MIS) ohne die Notwendigkeit eines erfahrenen Assistenzchirurgen
- Solo-Chirurgie System, bestehend aus einem Paar kooperierender und autonomer Roboterarme, die die chirurgischen Instrumente halten
- Nutzung eines bahnbrechenden Moduls für künstliche Intelligenz (KI) zur Entwicklung eines kognitiven Robotersystems, das in der Lage ist, die aktuelle und zukünftige chirurgische Situation autonom zu verstehen und vordefinierte Aktionen am richtigen Ort und zur richtigen Zeit auszuführen
- Die Roboter-Assistenzarme von SARAS erfüllen alle Aufgaben, die der Assistenzchirurg während eines robotischen oder laparoskopischen Eingriffs durchführt

Künstliche Intelligenz-gestützte Diagnose und Behandlung von Krebserkrankungen des oberen Aerodigestivtrakts (AIRCARE)
Partner:
- Italian Institute of Technology, Italien
- KU Leuven, Belgien
- University of Southern Denmark, Dänemark
- Sant’Anna, School of Advanced Studies – Pisa, Italien
- University of Genoa, San Martino Hospital, Italien
- IDIBAPS, Hospital Clinic of Barcelona, Spanien
- El.En. Group, Italien
- BARCO NV, Belgien
- Inventya Ventures, Irland
- TimeLex, Belgien
- D'Annunzio University, Italien
ACMITs Beitrag:
- Integration einzelner Eingabeelemente in eine zentrale Chirurgenkonsole
- Einhaltung gesetzlicher Vorschriften
- Dokumentation des Zertifizierungsprozesses
Beschreibung:
- Entwicklung einer KI-gestützten Diagnose und Behandlung von Krebserkrankungen des oberen Aerodigestivtrakts (UADT)
- Einführung fortschrittlicher KI-gestützter und robotergestützter Technologien in klinische Arbeitsabläufe
- KI-gestütztes integriertes Diagnosesystem für Real-time Erkennung und Diagnose
- Früherkennung und In-situ-Krebscharakterisierung
- Integriertes Therapiesystem für verbesserte Erkennung von Tumorrändern und erhöhte chirurgische Präzision
- KI-gestützte Tumorsegmentierung, robotergestützte Lasersteuerung und fortschrittliche, über eine ergonomische Konsole gesteuerte Roboterzangen für mehr Sicherheit und Genauigkeit
